
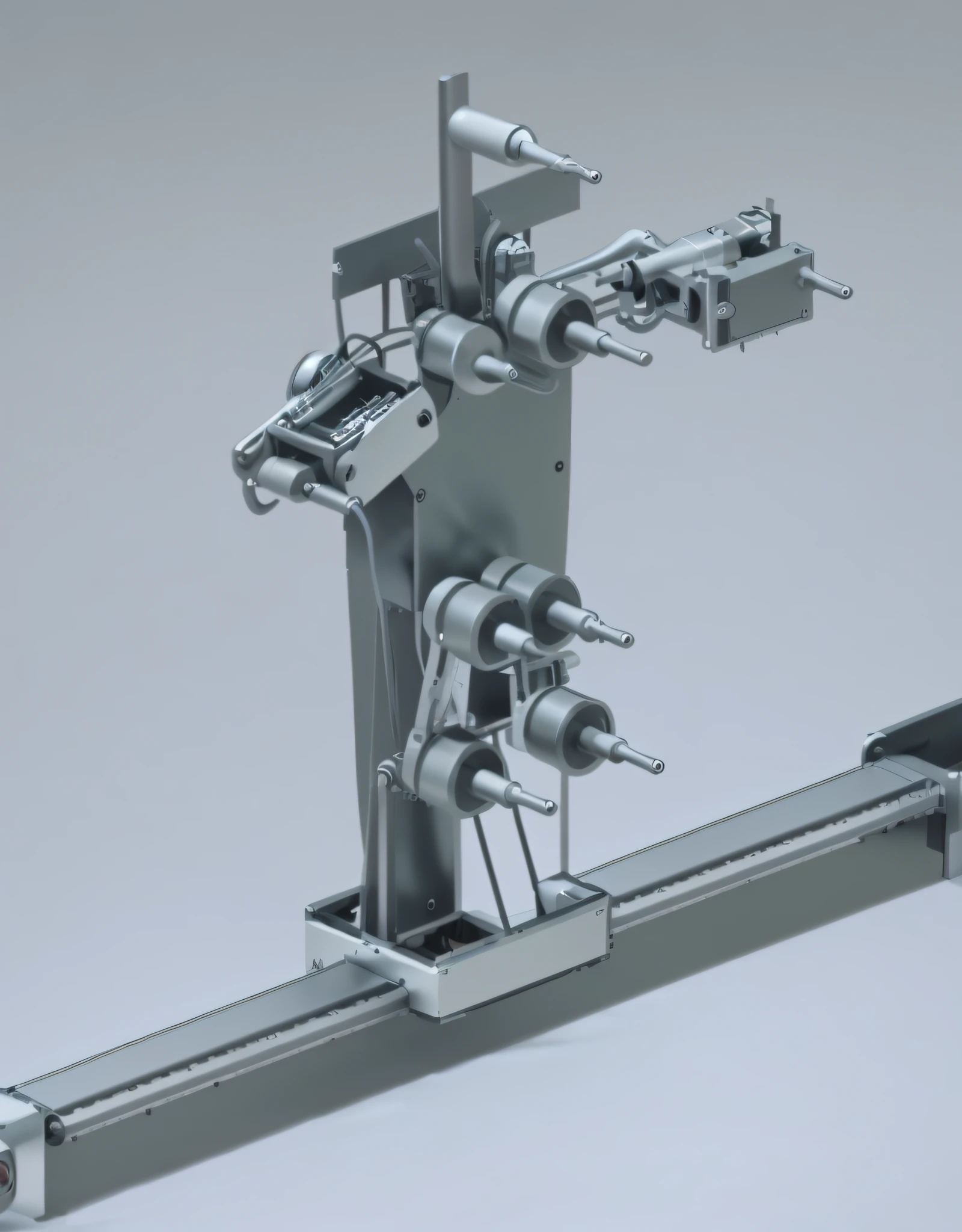
A close up of a machine with a metal frame on it


W
Prompts
Copy
A shadow robot structure similar to human joints is designed
,
and through the adaptation of anthropomorphic mechanical structure to human joint points and shadow model control points
,
multi-joint control of shadow puppet action performance is realized
,
and the possibility of action performance is enriched
.
This design simplifies the complexity of the control algorithm
,
improves the versatility of the algorithm
,
and matches the deep learning model for human skeleton recognition
.
In order to meet the mechanical structure requirements of the human skeleton model for shadow robot control
,
you have designed the corresponding hardware drive system
.
The system uses an STM32 microcontroller as the underlying hardware driver
,
and uses a DS3230 digital servo for precise control and DC motor control with encoder for joint and chassis control
.
In addition
,
reliable real-time communication is required between the upper and lower computers
,
and you have chosen a communication method suitable for data transmission
.
Your project involves the data processing of the upper computer
,
the design of the shadow puppet mechanical structure
,
and the construction of the hardware circuit module of the lower computer
.
Artificial intelligence technology
,
robot structure technology and embedded technology are applied to realize the intelligence and automation of shadow robots
.
The system obtains real-time video streams or local video streams through the camera module
,
uses deep learning models to detect and cluster key points of the human body
,
and then calculates the rotation angle of the joint limbs to achieve human posture estimation and tracking
.
Through the serial port
,
the rotation command is sent to the lower computer STM32 single-chip microcomputer
,
and the joint servo and chassis DC motor of the shadow puppet robot are driven to realize the movement of the shadow robot
.
In addition
,
your system is designed with voice control mode
,
gesture recognition mode
,
and self-programming performance mode
.
The voice mode recognizes specific voice commands through the intelligent speech recognition module
,
allowing the shadow puppet robot to perform the corresponding action
.
Based on the deep learning gesture recognition framework
,
the gesture recognition mode realizes the recognition of user gestures and allows the robot to perform the corresponding actions
.
The autonomous programming mode allows the shadow puppet robot's action sequences to be pre-programmed and then automatically performed in the programmed sequence
.
In terms of human pose detection system
,
you used the human body analysis and human bone semantic segmentation tasks to identify the components and bones of the human body
.
INFO
Checkpoint & LoRA

Checkpoint
Deliberate
0 comment
0
0
0
SeaArt Swift AI Apps
AI Video Generation
Unleash your imagination and let AI create visual wonders for you

Face Swap Online Free
Create funny or realistic face swap videos & photos in a snap

Studio Ghibli Filter
Transform any photo into unique Ghibli-style art in just one click.

Remove Background
Remove backgrounds from any image in seconds.

Cartoon Avatar Maker
Turn your photos into unique cartoon avatars instantly.

AI Kissing Video Generator
Join the kissing trend with SeaArt's AI kissing video generator instantly. Easily make two people kiss, and create realistic animation.
Explore More AI Apps